
Most experimental campaigns involve multiple sensors, and the recorded time series must be aligned with a central reference for a proper analysis. Synchronizing data from multiple wireless sensors is one of the most deceptively difficult challenges in modern measurements. While wireless systems promise plug-and-play flexibility, they often fall short in one critical area: time.
Although cabled connection of sensors can limit the application of many use cases and complicate the organization of measurement campaigns, it can pose significant benefits for time synchronization. Low transmission delays, stable connection, low latency, minimal jitters are main factors that ease clock synchronization in wired connections.
Challenges in Wireless Synchronization
Wireless technologies rely on radiofrequency transmission. With radiofrequency transmission, the delays are greater, connection is less stable, latency is considerable. Moreover, the absence of wired connections requires sensors to be battery-powered and be as energy-efficient as possible to achieve sufficient measurement autonomy.
There are two main challenges to address:
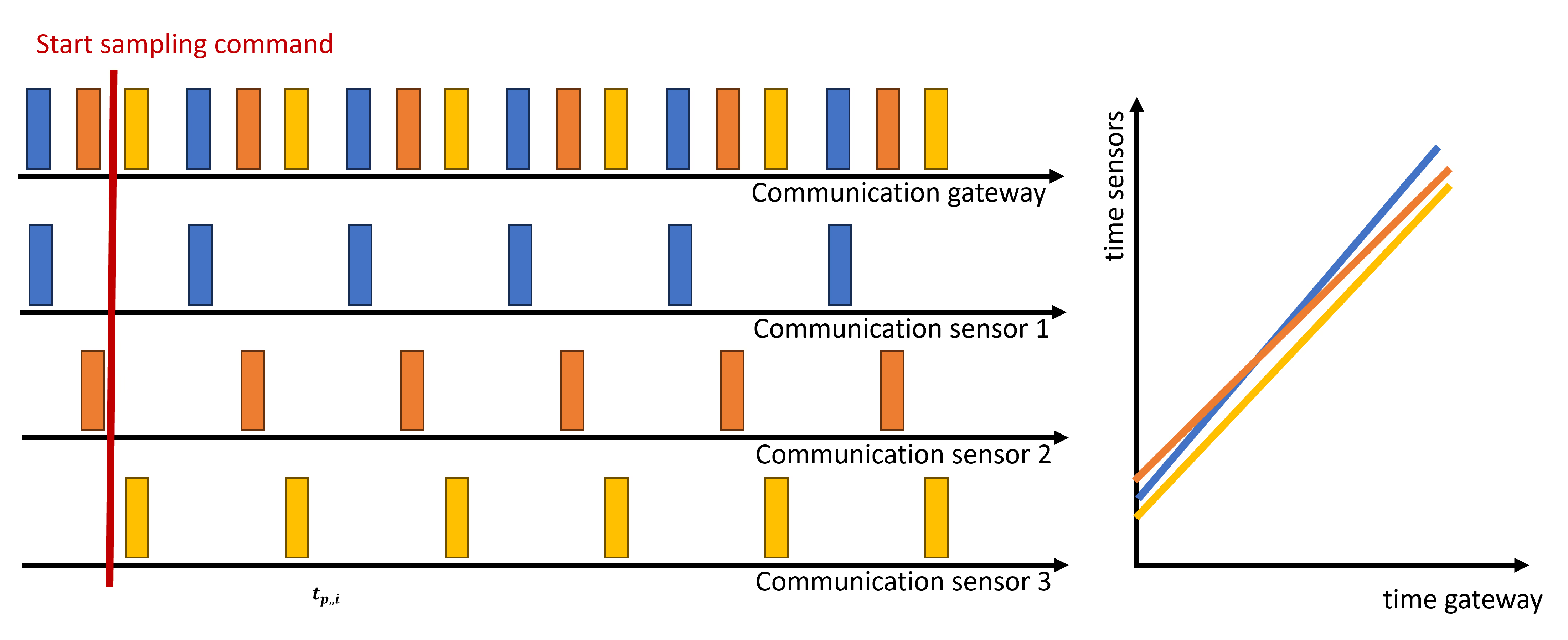
- Asynchronous Start Times
Start commands sent via radio reach each sensor at different times due to sequential communication. Some sensors begin sampling earlier than others. Figure on the left illustrates that the start command is received first by sensor 3 and last by sensor 2.
- Clock Drift Over Time
Each sensor operates on its own 16 MHz crystal oscillator, typically accurate to ±20 ppm. This can cause a drift of 20 microseconds per second. For a 1 kHz sample rate, even one minute is enough to cause significant misalignment between sensors. The figure on the right demonstrates how sensor 1 has a slightly higher clock frequency than sensor 2.
To conserve battery power, communication does not occur continuously but intermittently. As a result, the hardware is kept as simple as possible, and the embedded software is designed in a highly minimalistic manner to reduce processing overhead. Since the hardware and software are kept minimal, tasks are scheduled via a processor, which is inherently non-deterministic. This makes timing unpredictable and limits the possibilities for straightforward corrections.
Forcebit’s Approach: Hardware Timestamping
This issue is well known in the wireless community, and while various approaches exist, no widely adopted standard is available in commercial software development toolkits. Forcebit’s innovation centers around one key idea: establishing a common time reference between sensor and gateway.
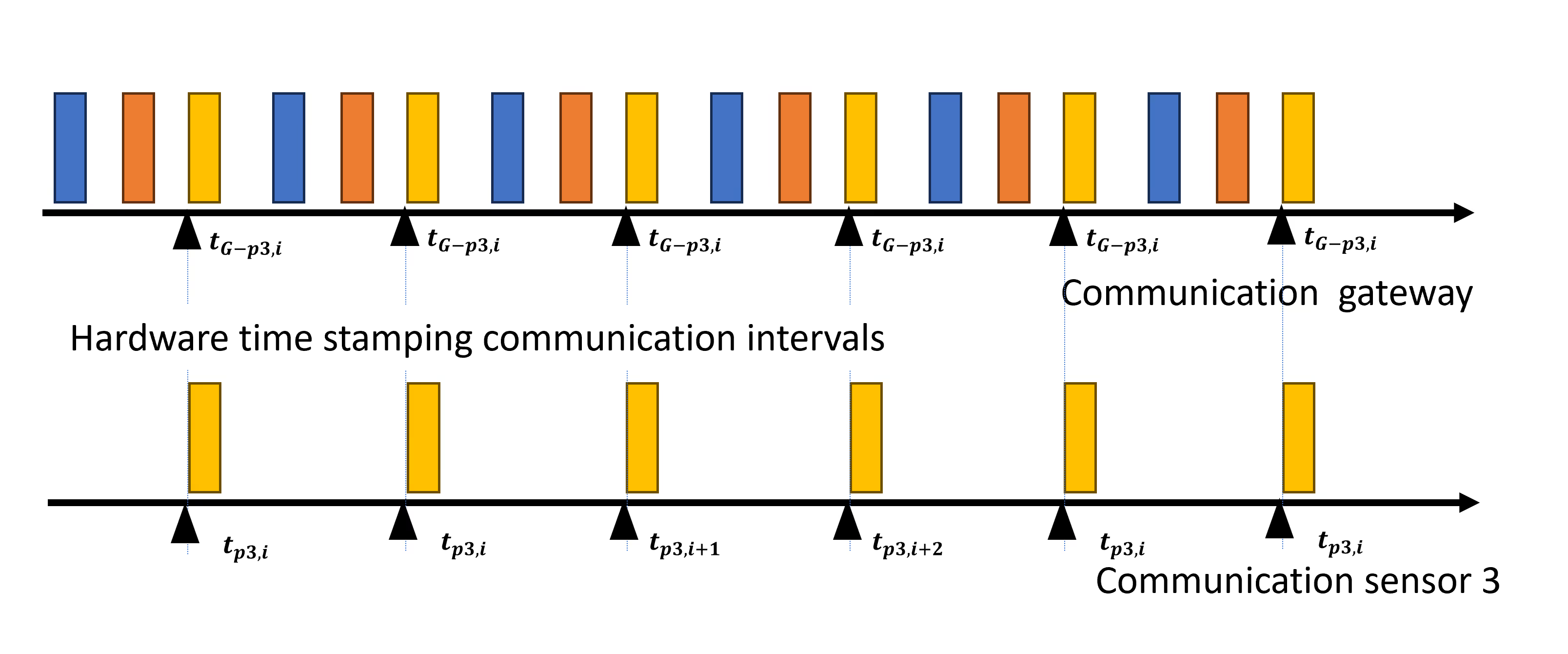
We do this using hardware timestamping, a method that:
- Timestamps the exact moment when the radio transceiver becomes active,
- Captures this timestamp both at the sensor and the gateway,
- Bypasses processor-induced delays for high-precision timing.
With this method, we can synchronize the sensor clock with the gateway clock. The process is illustrated in Figure below.
What Precise Clock Synchronization Enables
With Forcebit’s synchronization approach, our users can confidently collect aligned data from up to 6 wireless sensors, accurate within just 10 microseconds. When multiple sensors are time-aligned down to microsecond precision, the quality and range of analysis improves dramatically. With Forcebit sensors, users can cover applications like:
- Perform modal analysis: Measure vibration across multiple points on a structure to identify natural frequencies, mode shapes, and damping ratios.
- Diagnose rotating machinery: Capture time-aligned vibrations on shafts and gears to detect imbalance, misalignment, and faults.
- Measure time-of-flight: Track how fast events like impacts or pressure waves propagate through components.
- Analyze powertrains: Synchronize data from engine mounts and housings to study drivetrain dynamics and NVH.
- Evaluate suspension dynamics: Correlate sensor data across vehicle corners to assess load distribution and handling.
- Align with CAN/ECU data: Synchronize physical measurements with digital vehicle data to validate control logic and detect latencies.
What’s next?
This is just the beginning. We’re currently exploring full synchronization with external data acquisition systems, which is an important next step for many users. While native synchronization isn't yet available, there is an effective workaround already in use:
You can place a Forcebit accelerometer and a sensor from the external system at the same physical location. By correlating their signals in post-processing, typically using cross-correlation techniques, you can align the datasets accurately and achieve functional synchronization.
Next up: Integrating seamlessly with external DAQ systems. Stay tuned for the upcoming news.

.png)
.jpeg)